
Chapter 3 - Visual Programming using MiROS
Parameter View
In ROS, Parameters are used to store configuration values that nodes can access or modify at runtime. They provide a flexible way to manage settings and values across different nodes without hardcoding them into the software.
Key characteristics of parameters in ROS:
1. Global Accessibility: Parameters are stored on the parameter server, making them accessible to any node in the ROS system, allowing for centralized control of configuration values.
2. Key-Value Pairs: Parameters are stored as key-value pairs, where the key is the parameter name (a string), and the value can be a variety of types (integers, floats, booleans, strings, lists, or dictionaries).
3. Runtime Modifiable: Parameters can be modified while the system is running, making it easy to update configurations without restarting nodes.
4. Namespaces: Parameters can be organized into hierarchical namespaces, making it easier to manage large sets of parameters for different nodes or subsystems.
5. Usage Across Nodes: Multiple nodes can share and access the same parameter values, which helps synchronize behavior across a robotic system.
Let’s continue with the same example in the last section to demonstrate how to interact with Parameters.
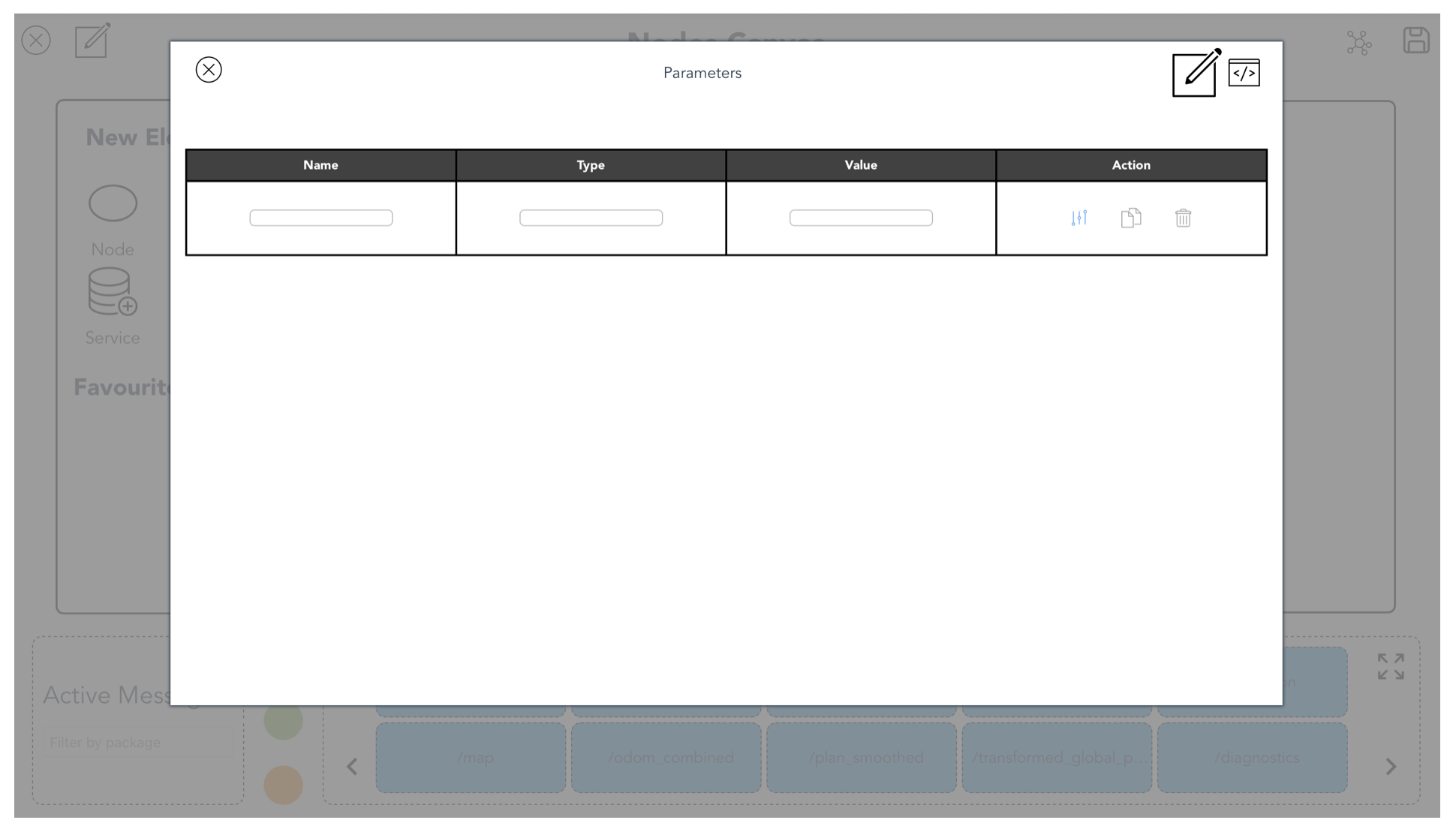
Double click on see_marker Node in Nodes Canvas to enter the Node Editor. Then click on the Parameter icon on the top left corner next to the Exit button. The Parameter View will open. Click on the pencil Edit button on the top right corner, you can now add or edit Parameters.
-
Add a short summary or a list of helpful resources here.