

Visual ROS
On the Cloud

Joshua, RoboCup Team Member, the University of New South Wales
“We built the entire project skeleton and migrated our code to ROS 2 Humble using MiROS within few hours.”
Colm, Founder, Hirocco
“When I ran a demo of my project to my clients, I used MiROS. It’s always easy to connect to my robot via a browser.”


Adam, STEM Coordinator, St. Narsai Assyrian Christian College
“My students don’t have to install Docker Desktop anymore. Less than 5 minutes, my students installed MiROS and started to code in ROS.”

Quickstart:
Step 1: Install Chrome
Chrome is tested to be the most compatible and stable web browser across Linux, Mac and Windows platform for MiROS Cloud.


Step 3: Install SSH Proxy & Agent (Optional)
-

Linux
-

Mac
-

Windows
Key Features:
Video Tutorial
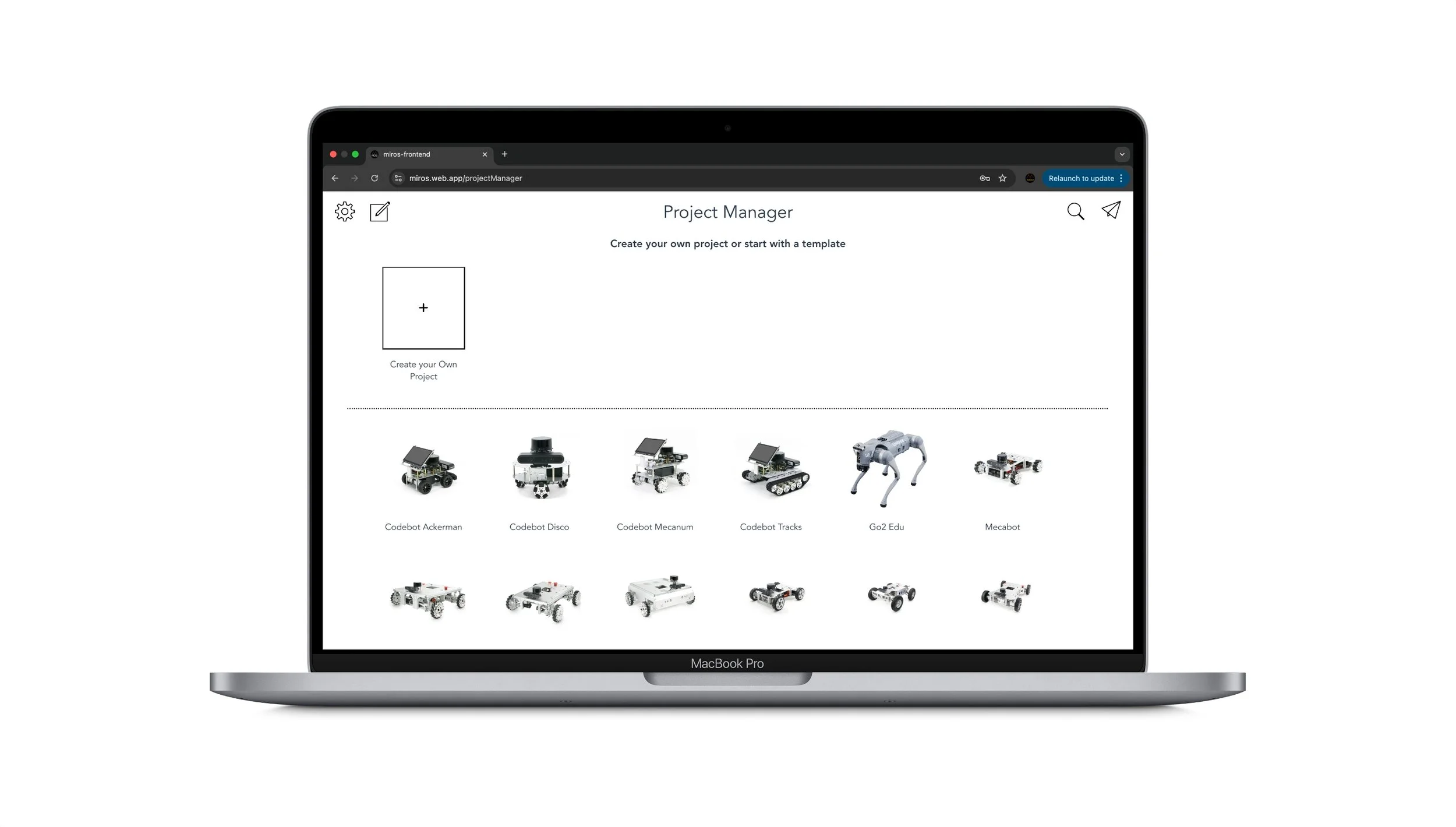
Start with a template.

Test Drive
Your “Hello World” in ROS.
Inspired by a group of high school students, we created Test Drive project template. This could be your first “Hello World” in ROS. We created simplified Launch Files, Nodes and Topics for you to easily modify and control your robot. For experienced users, Test Drive is a quick way to check your robot or run a demo for your target audiences.
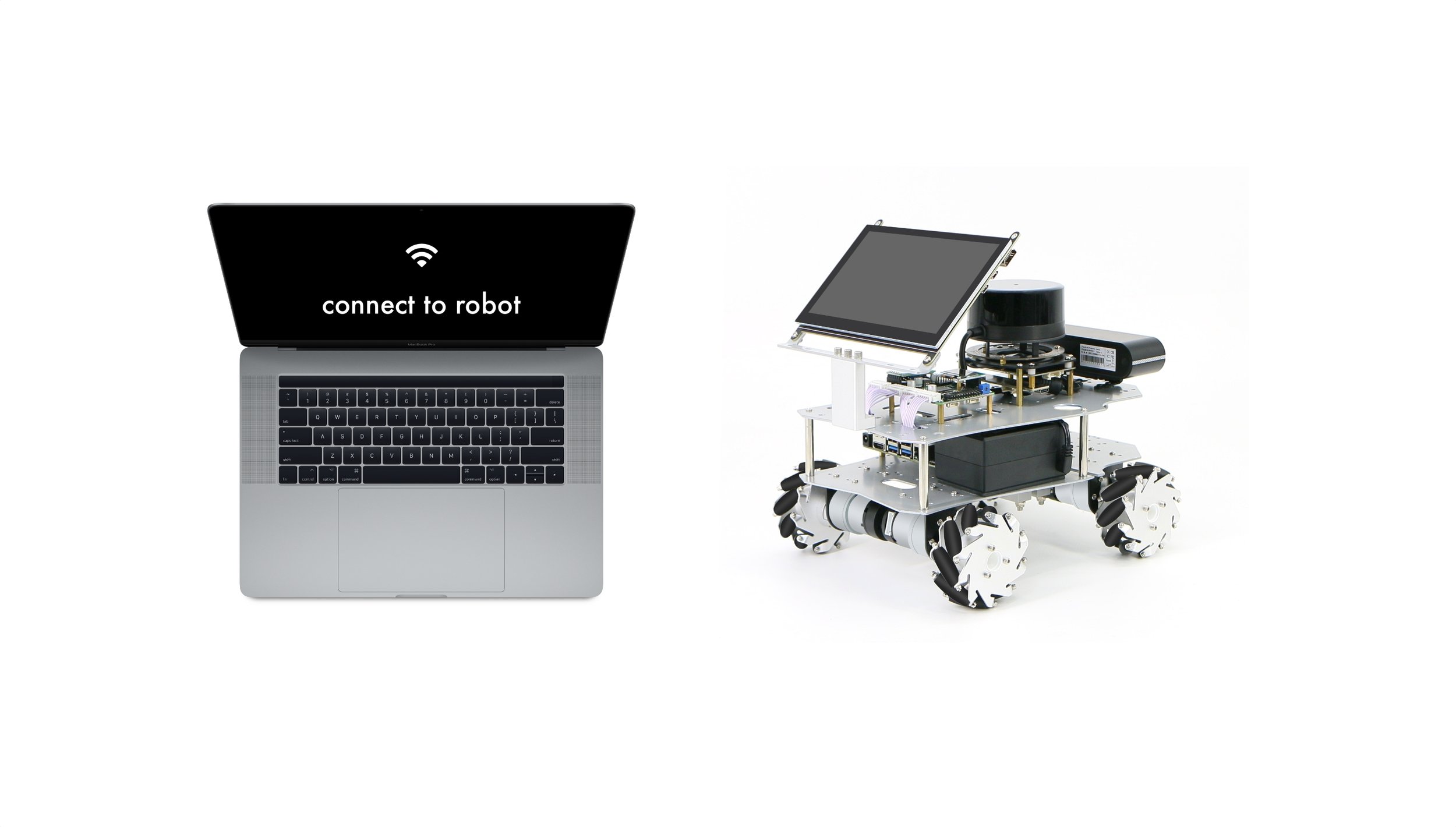
Connect to Robot easily
Connect through Wifi
Connect to your robot’s hotspot
Connect your robot to your Wifi network
Connect through Ethernet
Connect to your robot directly
Connect your robot to your local network
Visual Programming
-

Package Canvas
The factory default ROS Packages are labelled in red. Your custom ROS Packages are labelled in black.
-

Nodes Canvas
You can create ROS elements such as Nodes, Topics and Services by drag-and-drop.
-
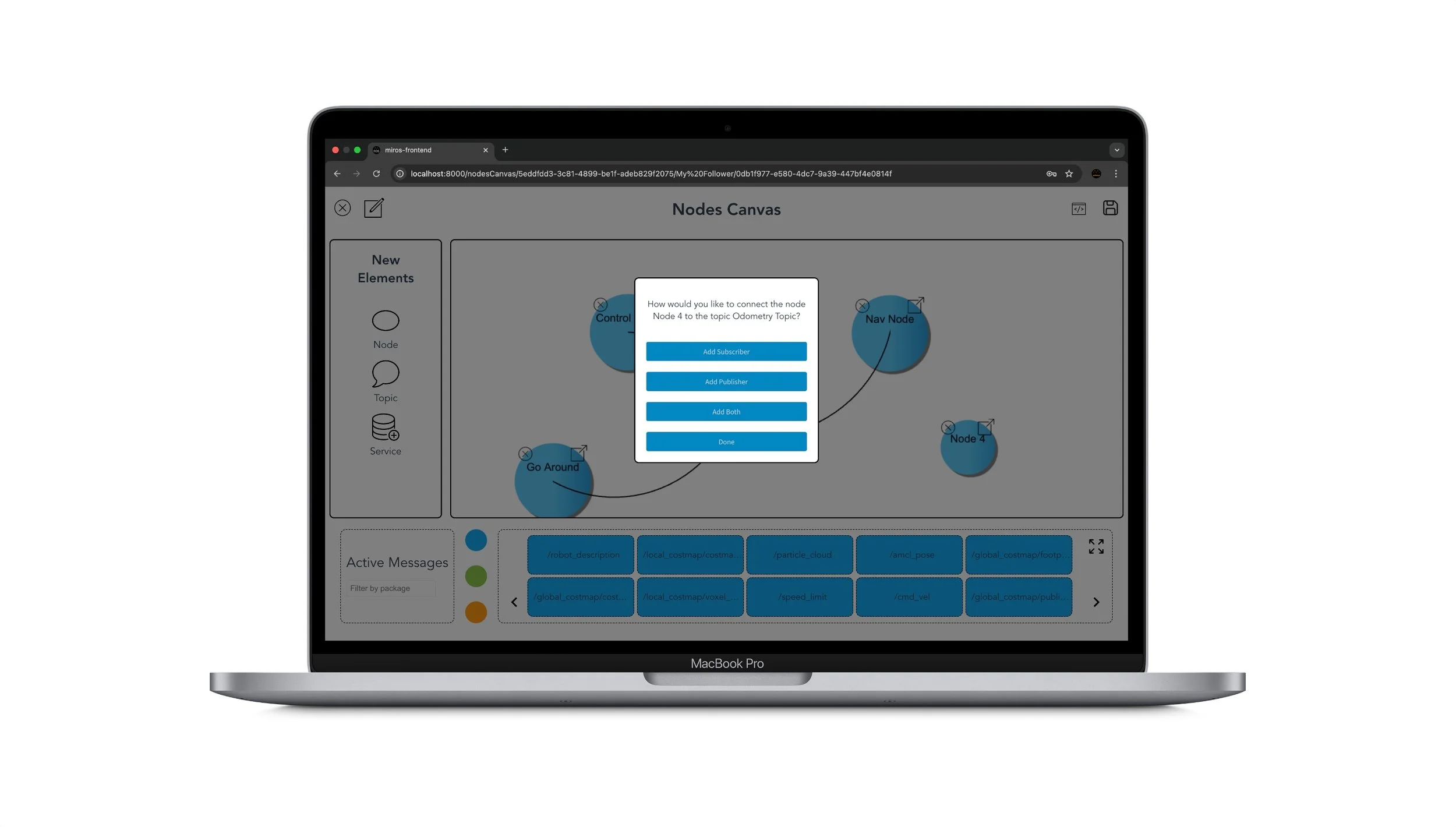
Publish & Subscribe
Dragging a line between a Node and a Topic to create a publisher or a Subscriber.
-
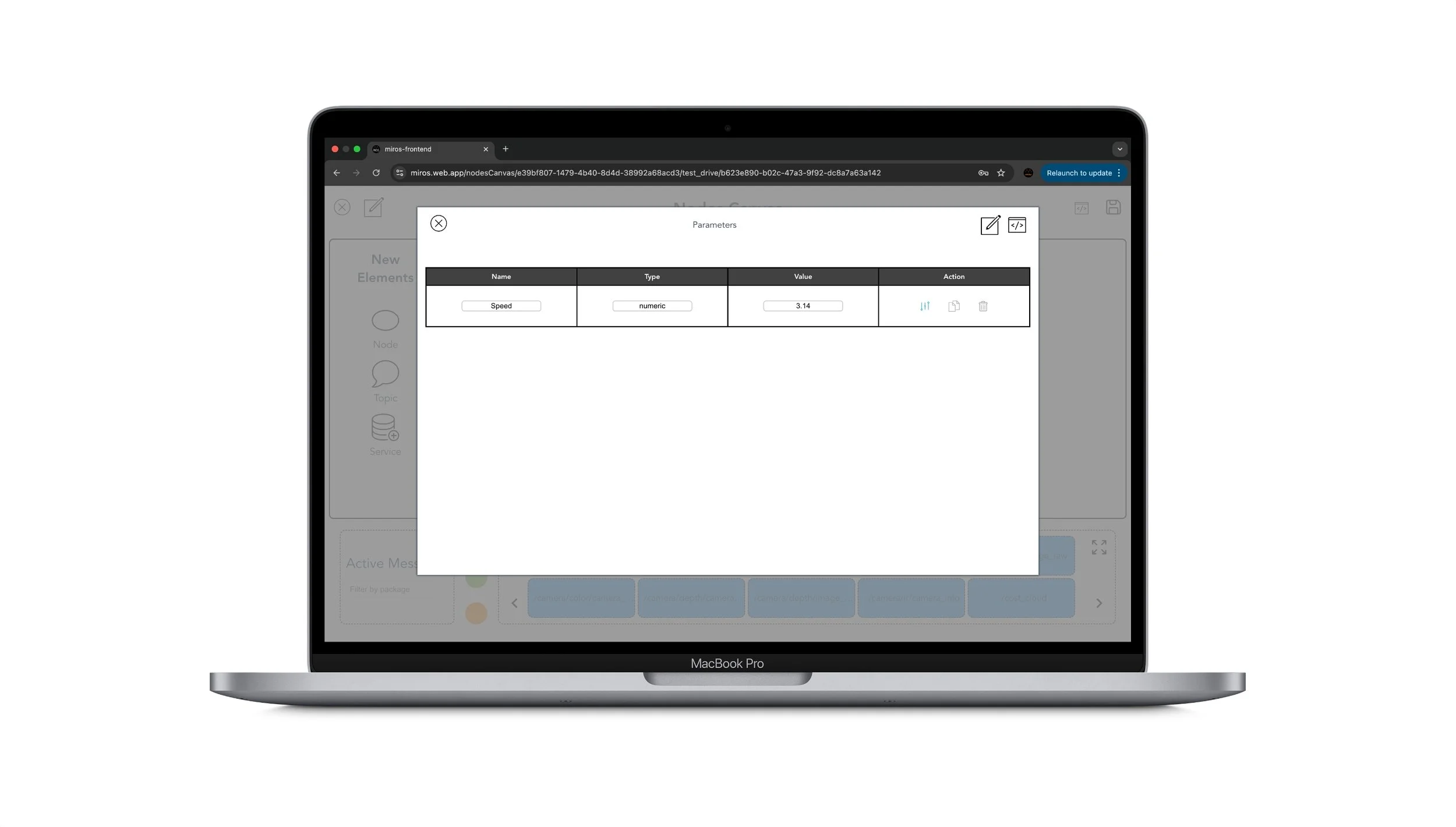
Parameter Table
You can create and modify your Parameters in the Parameter Table easily.
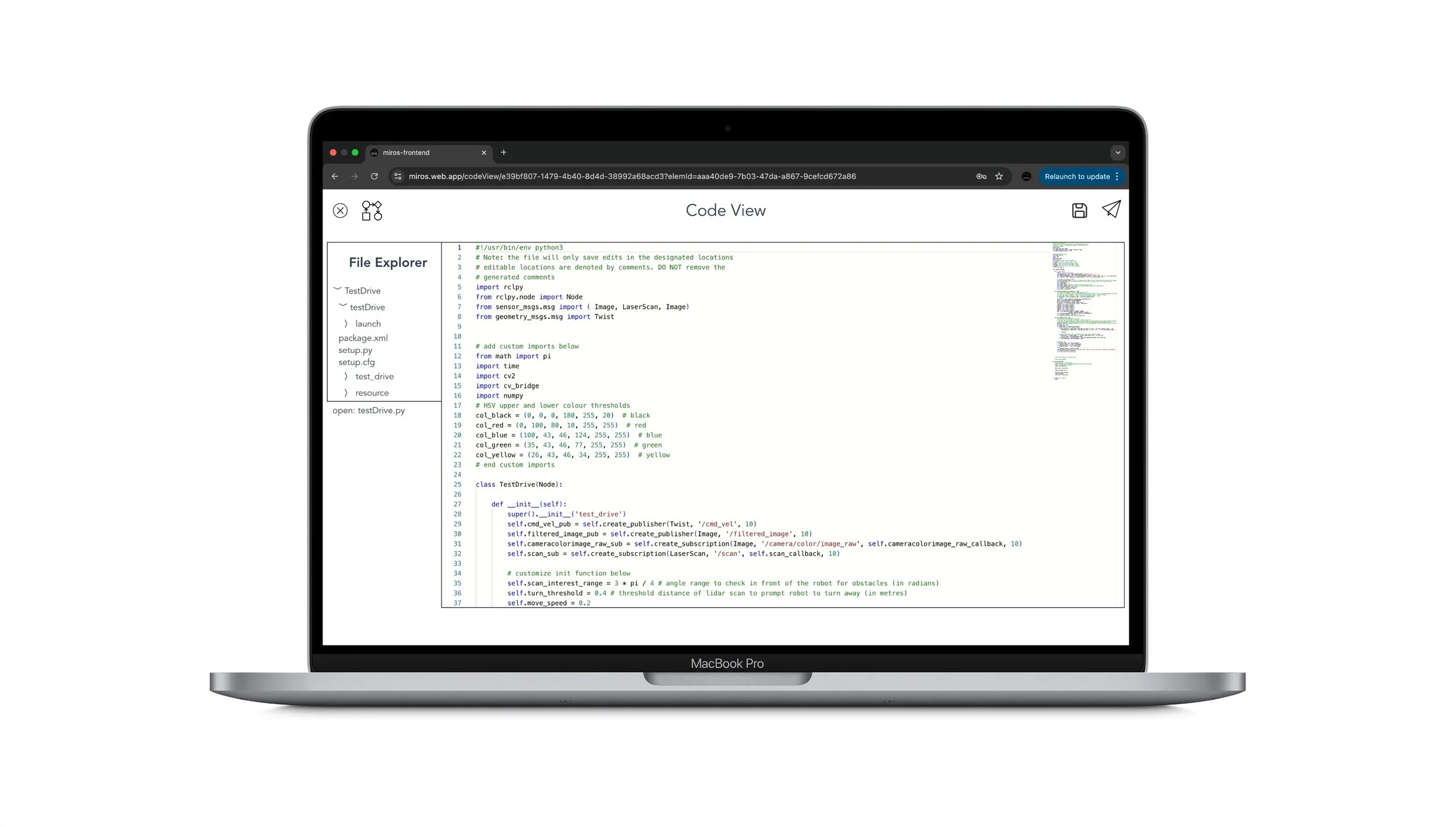
Code Editor
MiROS generates code for you automatically when you are editing your ROS Canvas. For experienced users, you can always review and modify your code in the Code Editor. When you create a Node, Topic or Service in the Nodes Canvas, you can choose your prefer programming language such as C/C++ or Python.


Build on the fly.
Synced with Git.
Certified Training
Click the below button to start the MiROS training certified by IEEE.