
Chapter 3 - Visual Programming using MiROS
Package Canvas
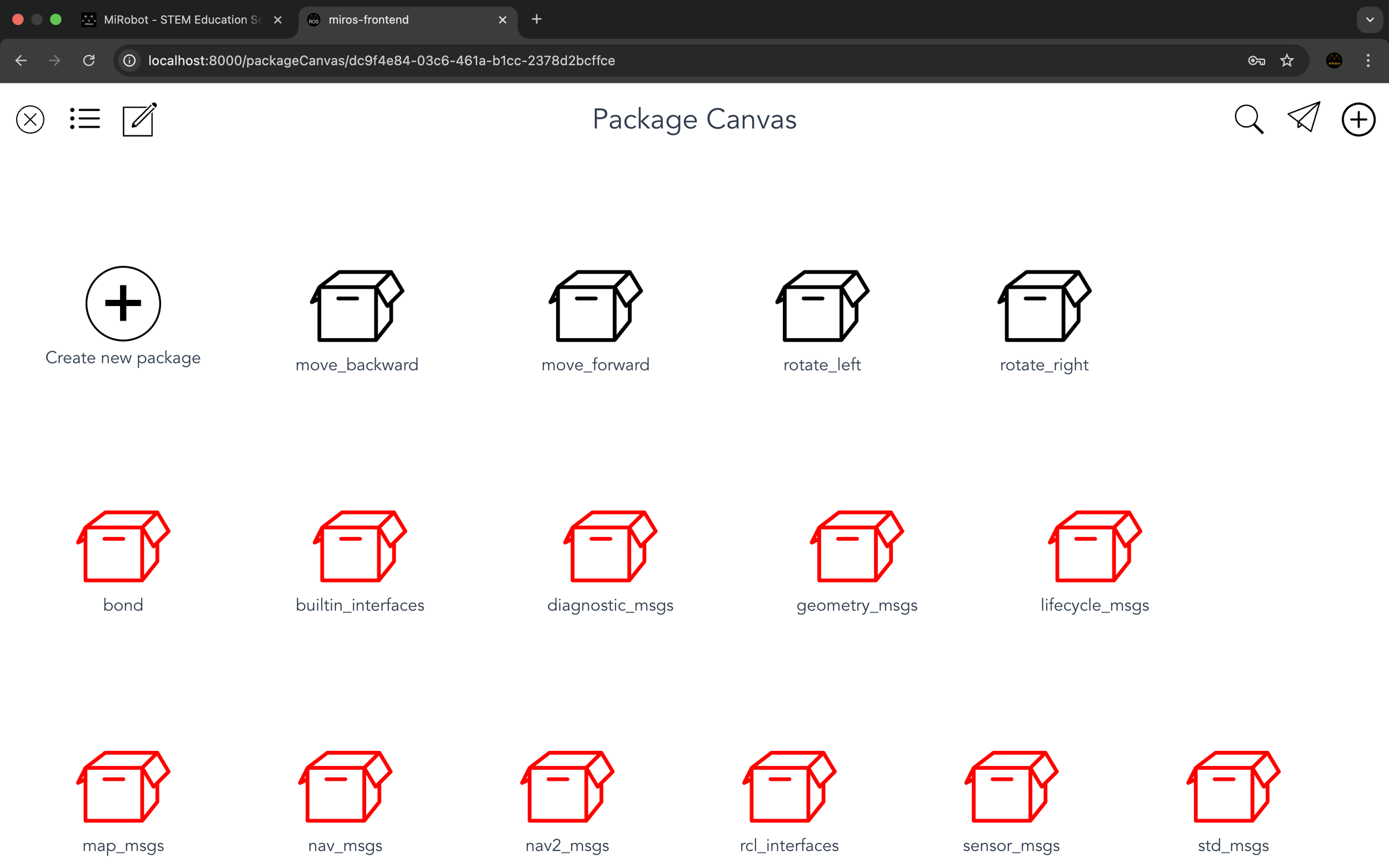
To start programming your project, click the ROS Canvas button in the Tool Bar on the top of Mission Control. You will see ROS Canvas as shown from the below screenshot:
IMPORTANT:
To protect the integrity of your robot’s software system, all default factory ROS packages are not editable in MiROS and are labeled in red.
To create your own ROS package, click the Plus button with a circle. Once you create your own ROS package, you can double click it to enter the Nodes Canvas and start your own ROS programming.
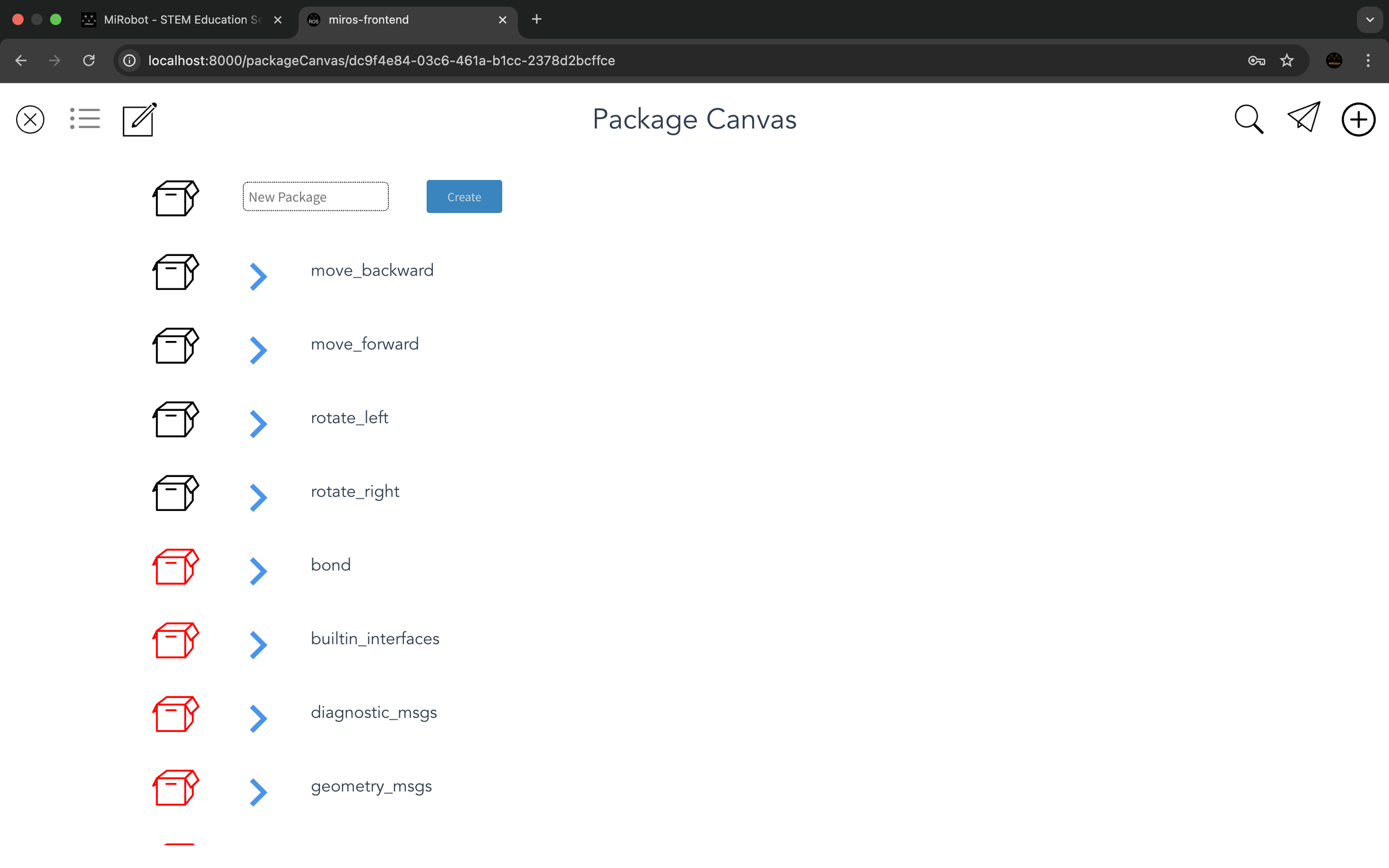
You can also switch the Package Canvas from the Icon View to List View by clicking the List View icon on the top left corner. The below screenshot shows the Package Canvas List View interface:
-
Add a short summary or a list of helpful resources here.