

Chapter 3 - Visual Programming using MiROS
Nodes Canvas
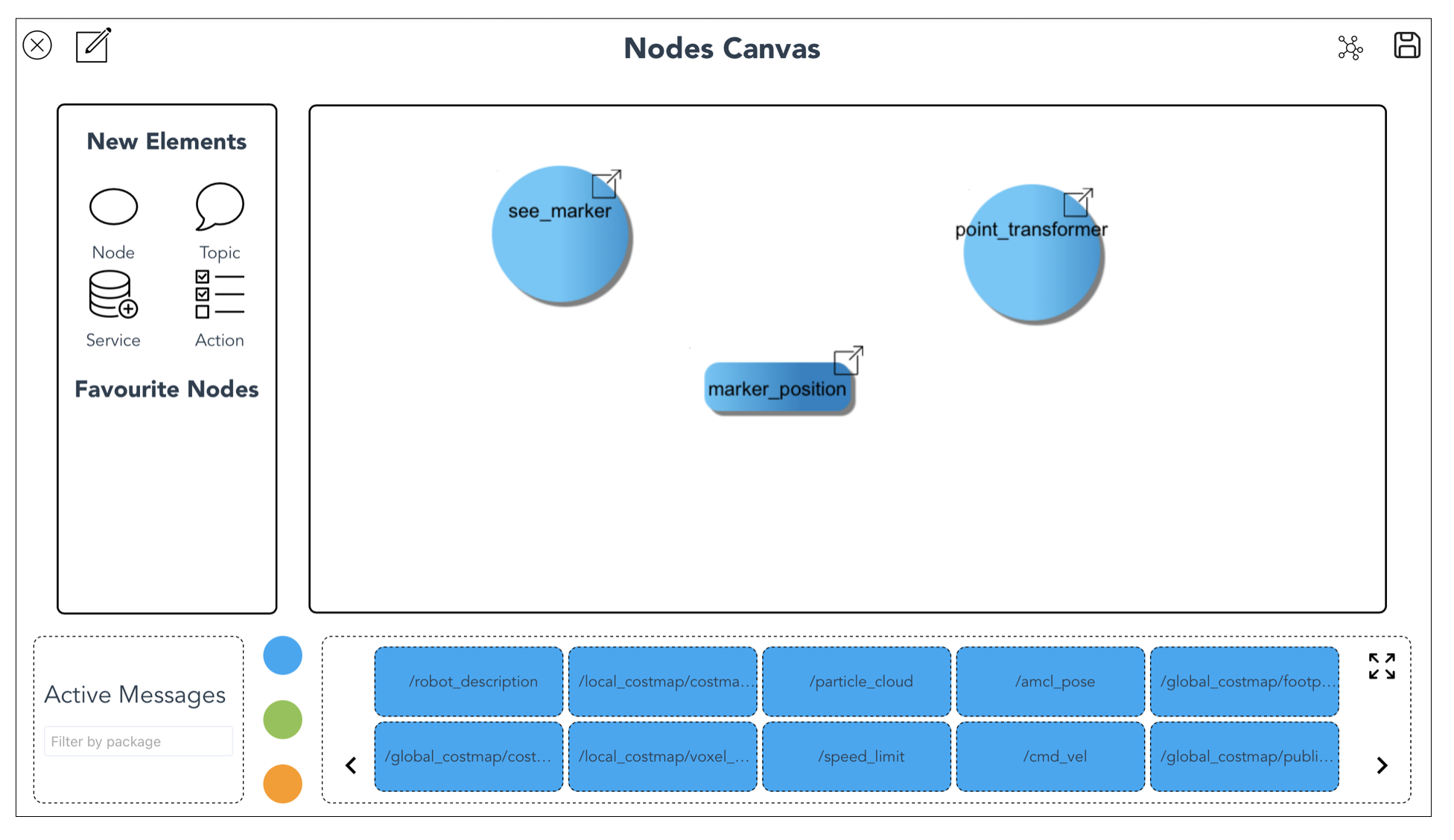
The Nodes Canvas is your main drawing board for graphical programming.
To start programming, drag one of the ROS elements from the left side pane to the main canvas. These ROS elements are:
Node
Topic
Service
Action
Here is an example to demonstrate the steps to create two Nodes connected by a Topic.
Step 1:
Drag a Node from the side pane to the main canvas.
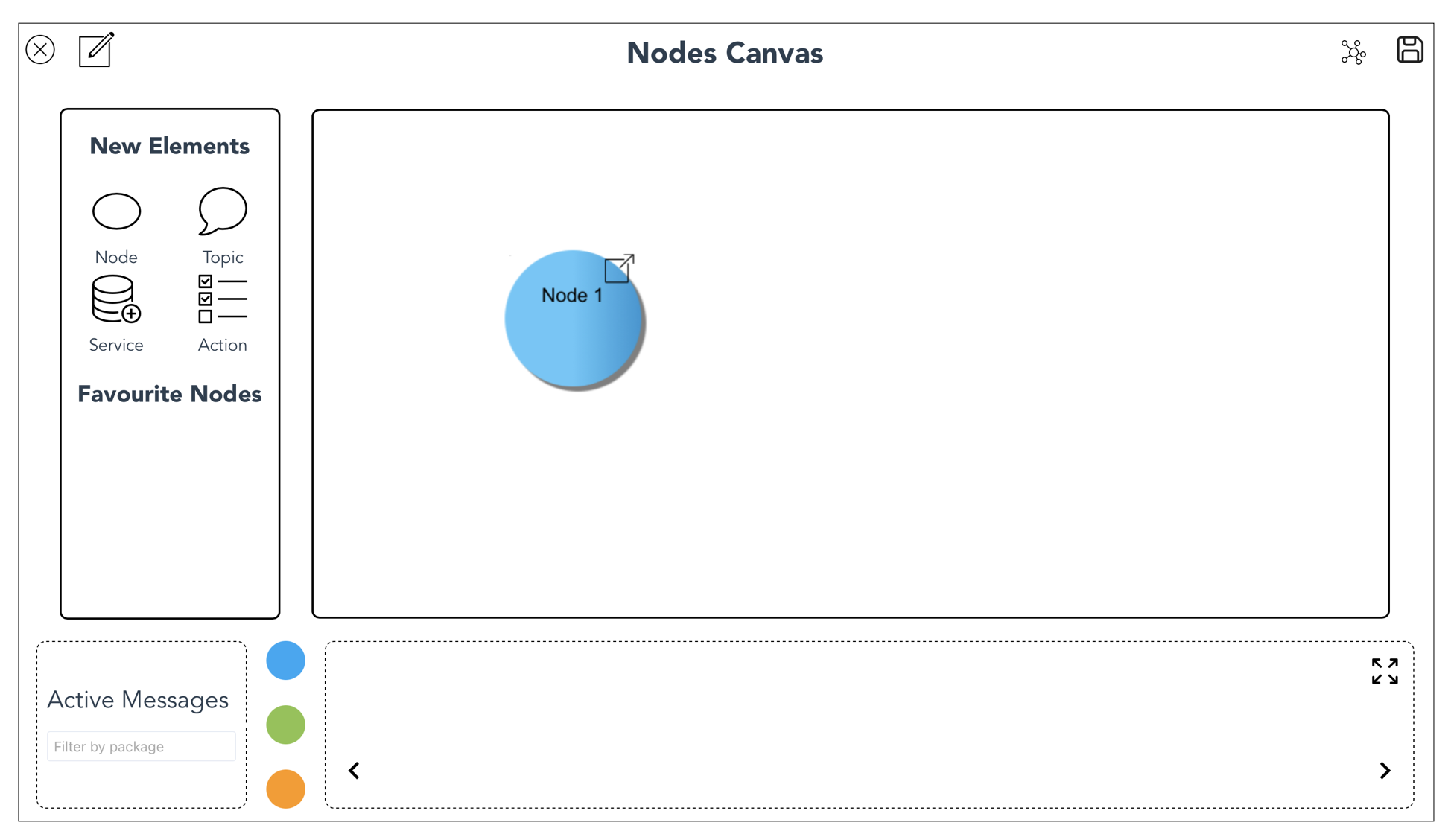
Double click on Node 1 to enter the Node Editor.
Step 2:
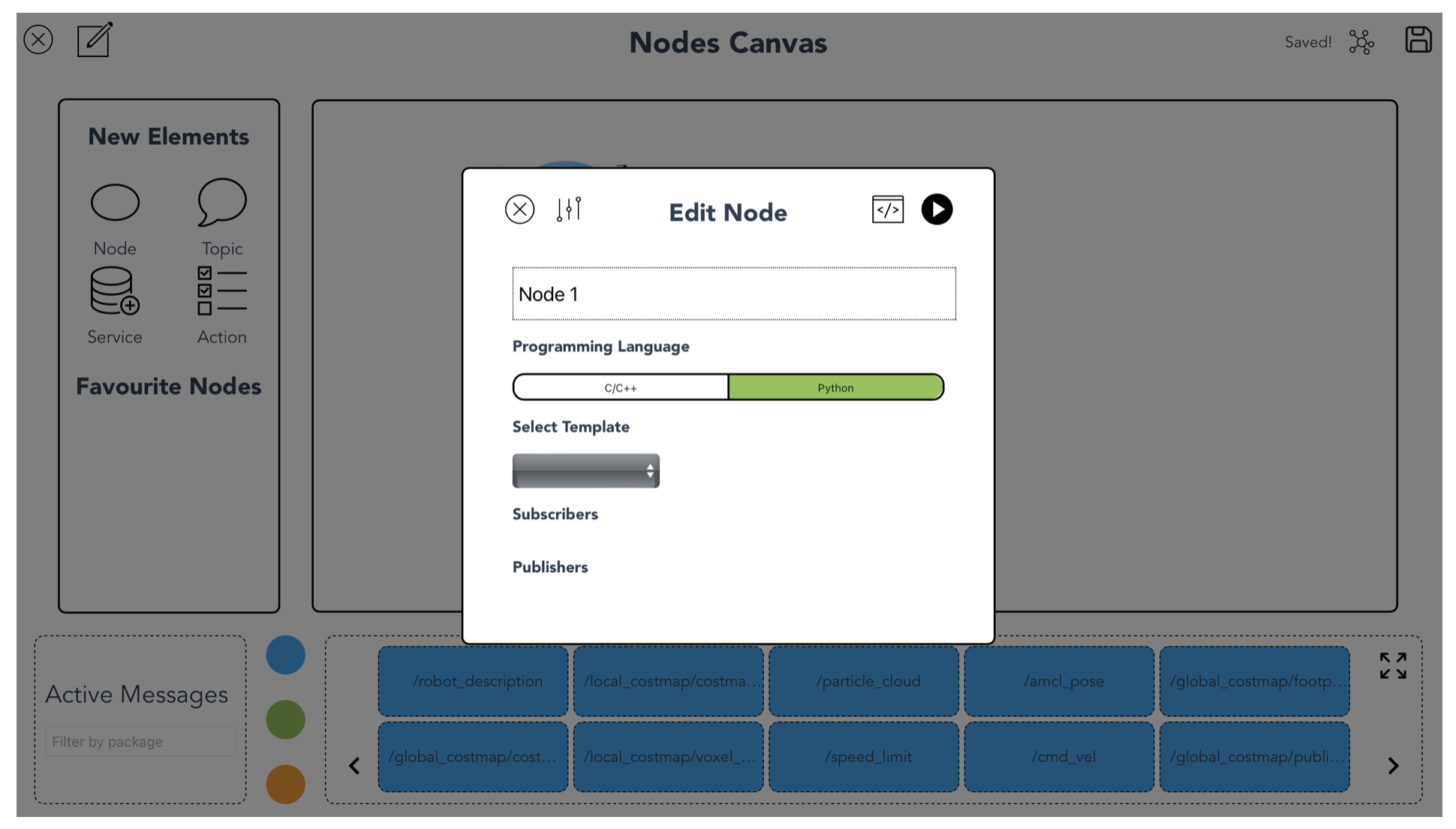
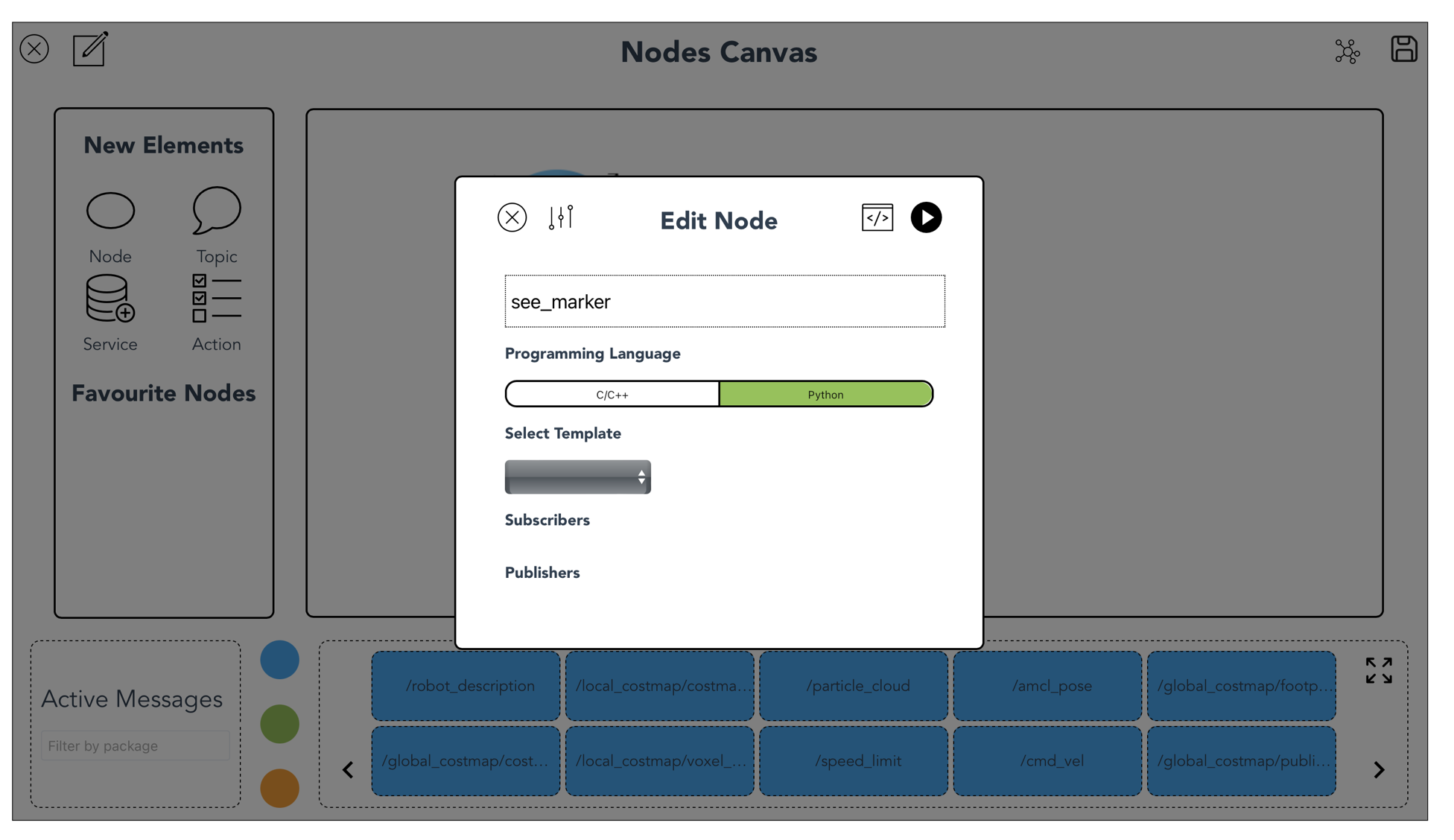
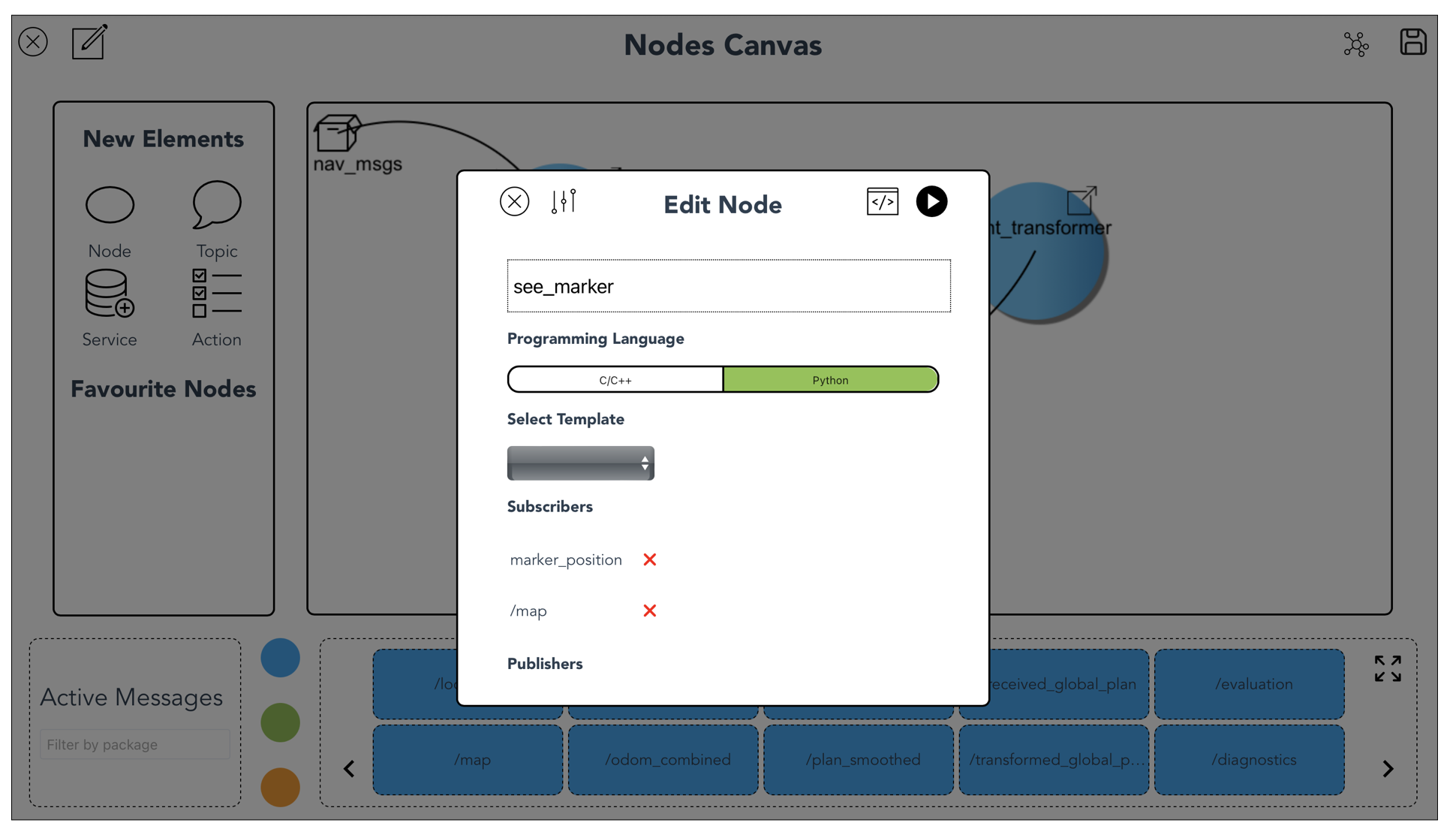
Name this Node as see_marker and choose Python as its programming language.
Step 3:
Step 4:
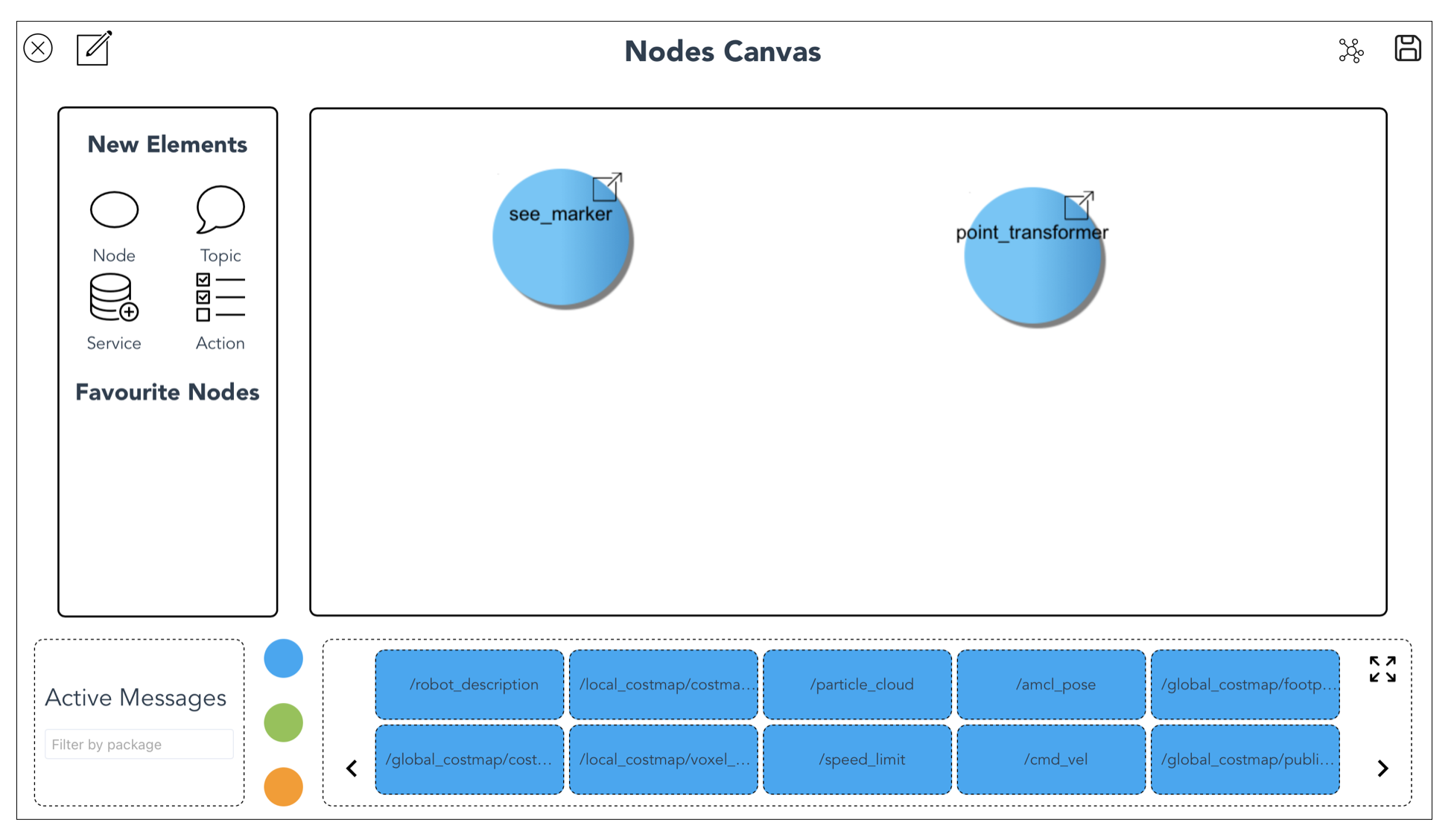
Exit from the see_marker Node Editor and drag a second Node to the main canvas. Rename it as point_transformer.
Step 5:
Drag a Topic from the side pane to the main canvas. Double click the Topic and name it as marker_position.
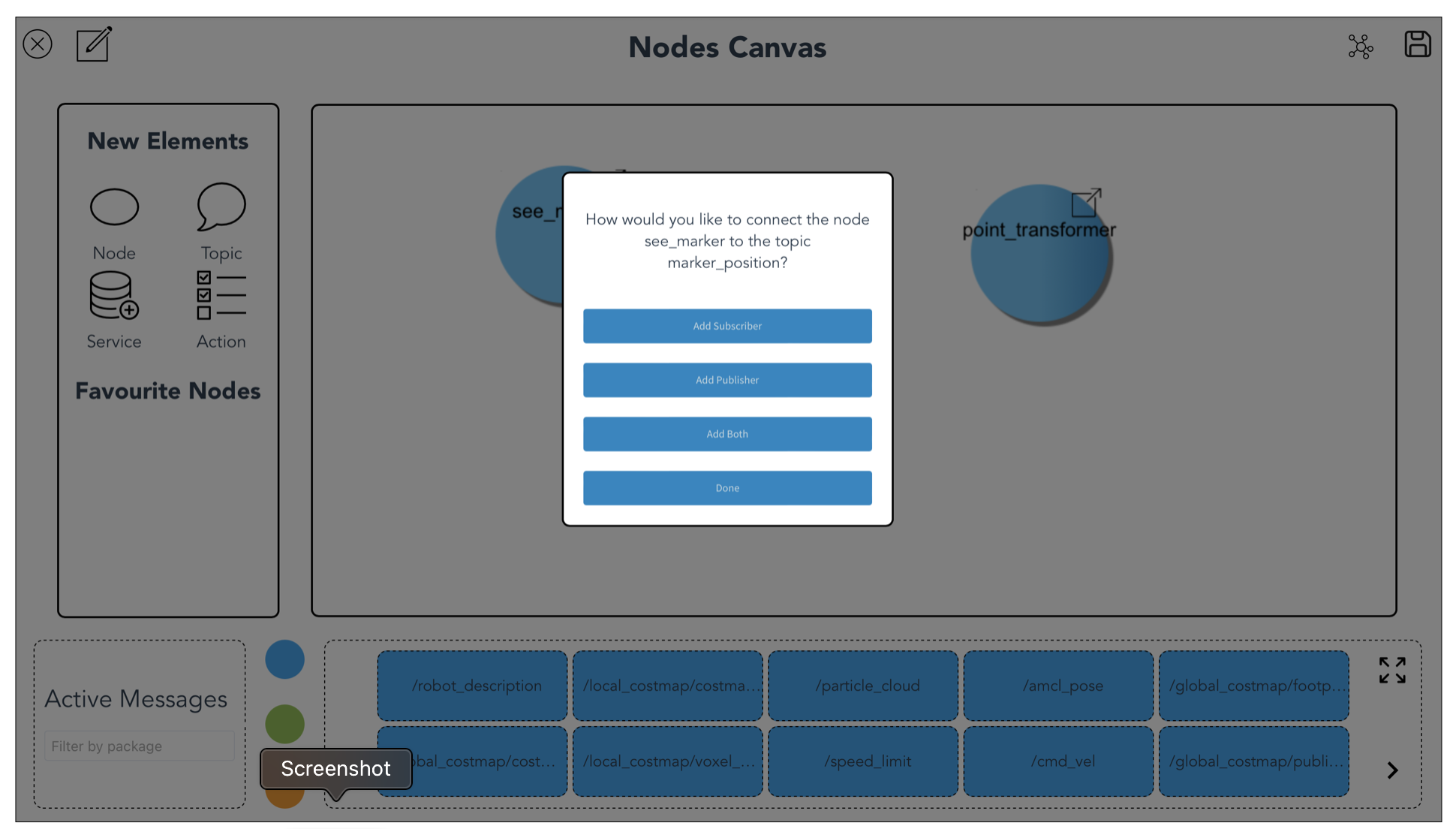
Step 6:
Drag the arrow from the see_marker Node to marker_position Topic, a Subscriber/Publisher selection window will pop up. Select Add Subscriber.
Step 7:
Drag the arrow from point_transformer Node to marker_position Topic, select Add Publisher from the pop-up window.

Step 8:
To connect a Node to a Topic/Service/Action from another Package, drag the arrow icon to the target Topic/Service/Action listed in the Active Messages Dock at the bottom. In this case, drag the arrow from see_marker Node to /map Topic. On the Nodes Canvas, you will see see_marker Node has a connection to the nav_msgs Package through subscribing to the /map Topic.

Double click on see_marker Node again, you will see see_marker Node has subscribed to 2 Topics:
marker_position
/map
-
Add a short summary or a list of helpful resources here.