

Chapter 3 - Visual Programming using MiROS
You will learn how to connect to your robot remotely.
MiROS connects to your robot via constant ssh connections. There are three requirements in order to maintain the constant ssh connection between the MiROS website and your robot:
Your localhost computer running MiROS and your robot should be connected to the same local Wifi network.
You should know the ssh login information of your robot including its IP.
Your robot has installed MiROS Linux version. Without MiROS installed on your robot, you still can connect to your robot from MiROS. However, the ssh connection is not constant.
After connection is established between MiROS running on your localhost computer and your robot, you can carry out the following actions:
You can send launch commands from your Launch File table in MiROS to your robot.
You can retrieve all of the ROS packages and active messages from your robot to MiROS.
You can test your code and how your robot functions in real-time.
To connect to your robot, follow the following steps:
Click on “Connect to Robot” button on the top right corner of the Mission Control interface.
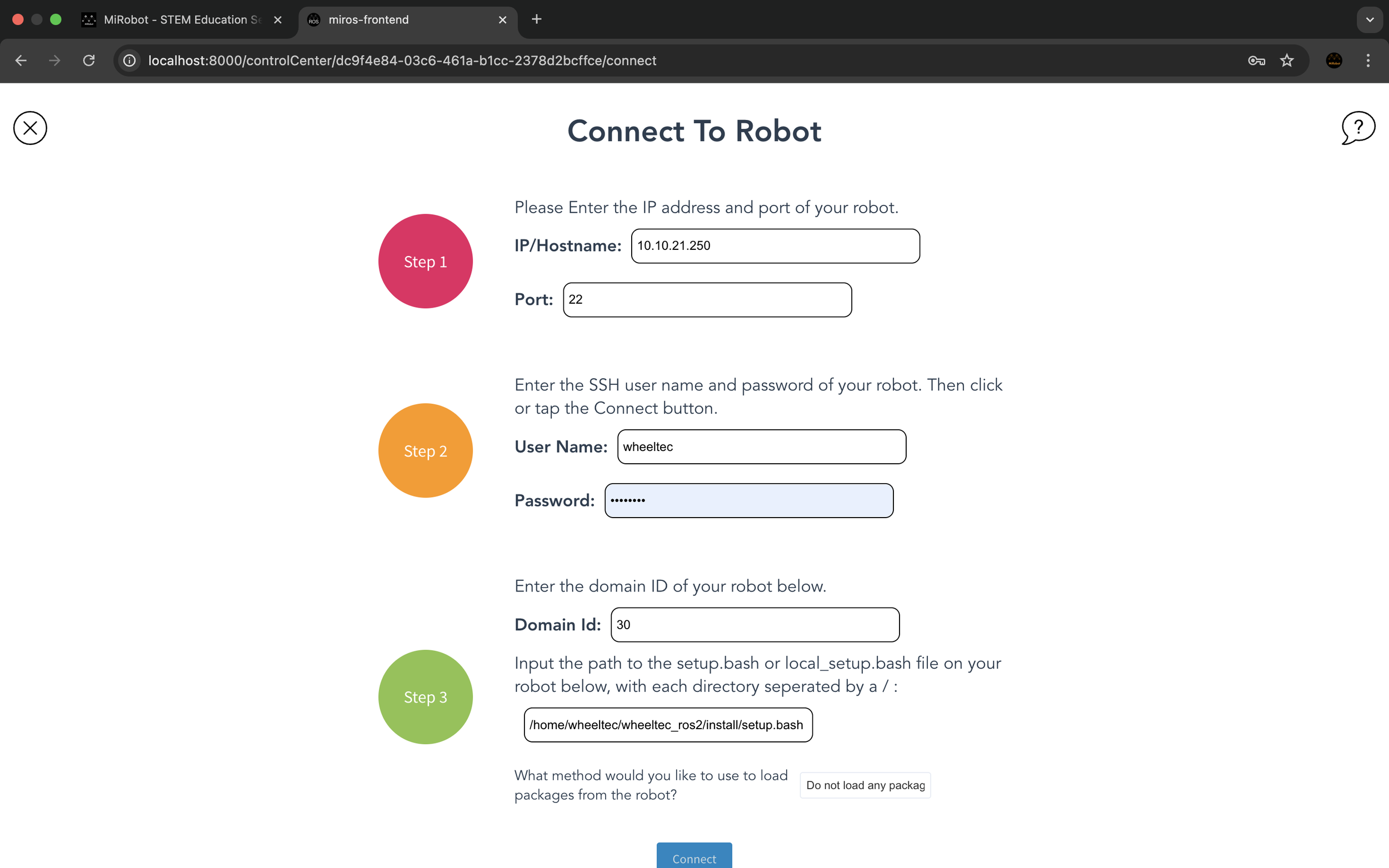
You will see the following screenshot to enter your robot’s IP, domain ID and the ssh login information.
IN THIS LESSON
IMPORTANT:
You should enter the setup.bash or local_setup.bash file on your robot.
If your project is based on an existing robot template, you don’t need to load all the ROS packages from your robot to MiROS anymore. You should keep the “Do not load any packages” option just above the blue “Connect” button. If you start your project from scratch, you may change the option to “Load all packages from robot”.
After you have successfully connected to your robot, you will see the following items added to your MiROS project:
Your robot’s IP is displayed on the top right corner of your Mission Control.
Your Launch File table should be filled with the launch files copied from your robot.
Enter into ROS Canvas, you will see all of your robot’s ROS packages are displayed and labelled in red.
-
Add a short summary or a list of helpful resources here.