
 Image 1 of 7
Image 1 of 7
 Image 2 of 7
Image 2 of 7
 Image 3 of 7
Image 3 of 7
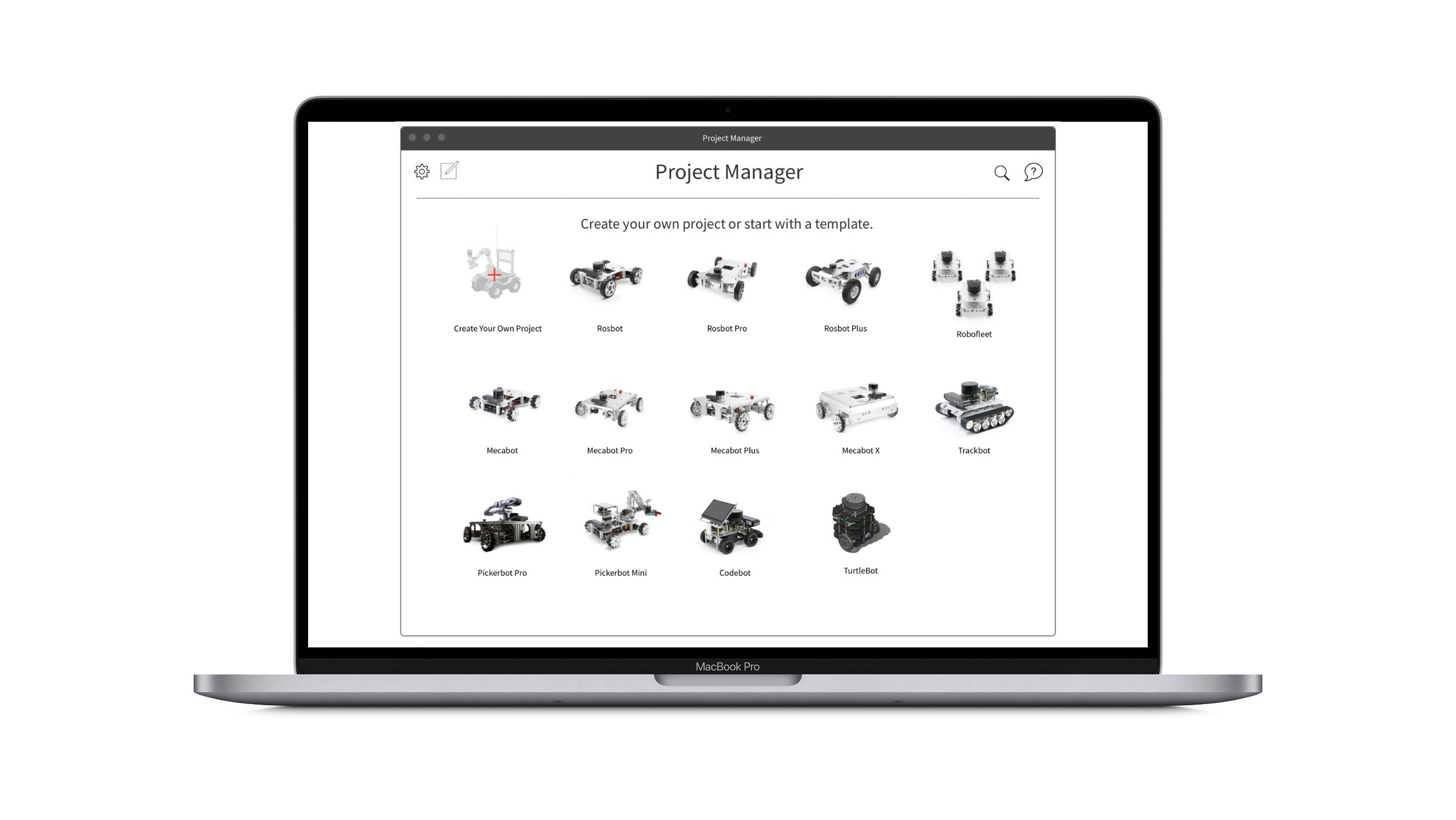 Image 4 of 7
Image 4 of 7
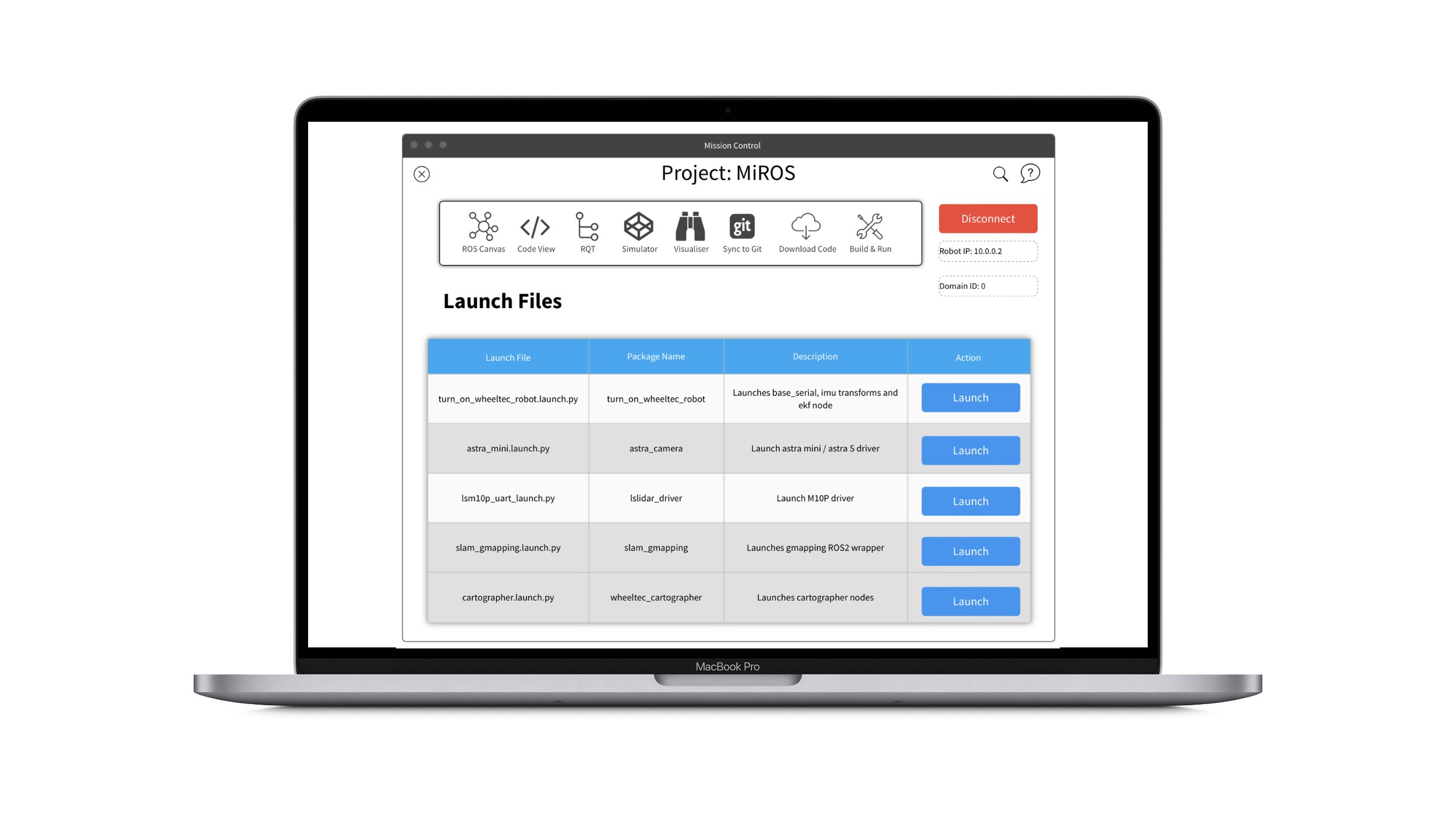 Image 5 of 7
Image 5 of 7
 Image 6 of 7
Image 6 of 7
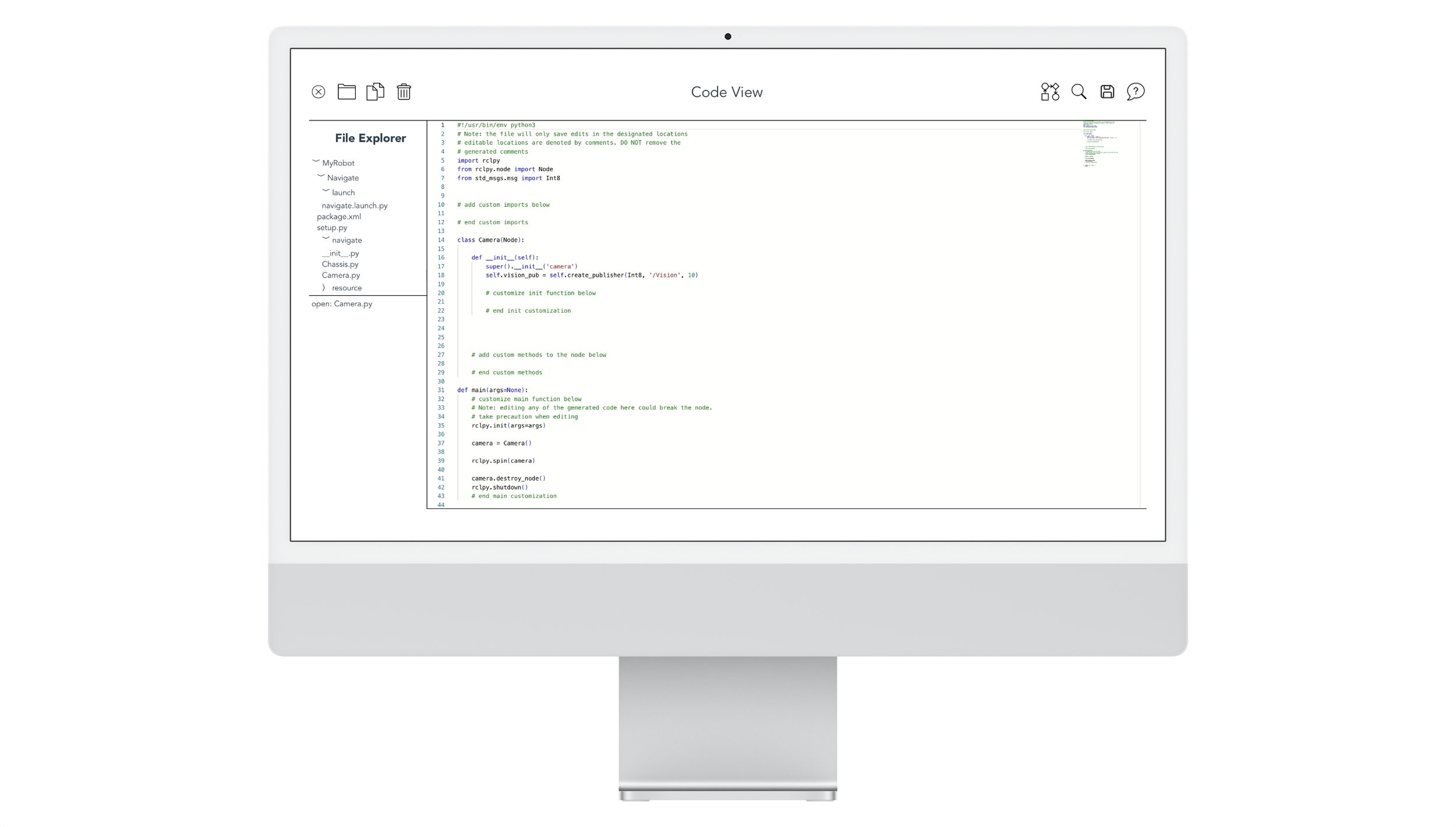 Image 7 of 7
Image 7 of 7
Highlights
Open-source Educational & Research Robot
Ackerman, mecanum or 4WD driving systems
Builtin LiDAR and Depth Camera
Pre-installed ROS2 Humble
Visual ROS Programming on MiROS Cloud
Product Models
Ackerman Drive:
Xbot - Model A (Pi)
Xbot - Model A (Orin Nano)
Xbot - Model A (Orin NX)
Mecanum Drive:
Xbot - Model M (Pi)
Xbot - Model M (Orin Nano)
Xbot - Model M (Orin NX)
4W Drive:
Xbot - 4WD (Pi)
Xbot - 4WD (Orin Nano)
Xbot - 4WD (Orin NX)
Why ROS?
ROS is the most popular robot operating system in the world. A hardware platform based on ROS will benefit the user gaining extensive practical skills from the world’s most promising robot operating system.
MiROS - Visual ROS Programming
Xbot is pre-loaded with MiROS, a visual ROS programming tool. With MiROS, you can connect and program your Xbot from any computer platforms using a web browser without the need to install Ubuntu and ROS on your host computer.
Quick Start
ROS and Ubuntu images are pre-loaded on Xbot which include all the essential ROS software packages and drivers. Our online tutorial will guide the user how to launch Xbot and its ROS packages within minutes.
Complete Solution
Xbot is a complete package for ROS learning and research projects bundled with all essential hardware components and ROS software.
Classroom Ready
Xbot comes with comprehensive classroom materials including user manual, tutorials and sample ROS codes allowing educators to integrate Xbot’s hardware and software package into their curriculum with ease and flexibility.
Applications
Autonomous driving
Autonomous mobile robot
SLAM
Navigation
Mobile manipulation
Delivery robot
Multi robot system
Human robot interaction
Mobile computer vision
Edge computing over 4G/5G
Dimensions
Xbot - Model A (190 x 280 x 186 mm)
Xbot - Model M (226 x 250 x 177 mm)
Xbot - 4WD (212 x 250 x 173 mm)
Weights
Xbot - Model A (3.3 kg)
Xbot - Model M (4.2 kg)
Xbot - 4WD (4 kg)
Xbot User Manul
Robot Simulation
STP File: click here to download
URDF File: click here to download