

 Image 1 of 8
Image 1 of 8
 Image 2 of 8
Image 2 of 8
 Image 3 of 8
Image 3 of 8
 Image 4 of 8
Image 4 of 8
 Image 5 of 8
Image 5 of 8
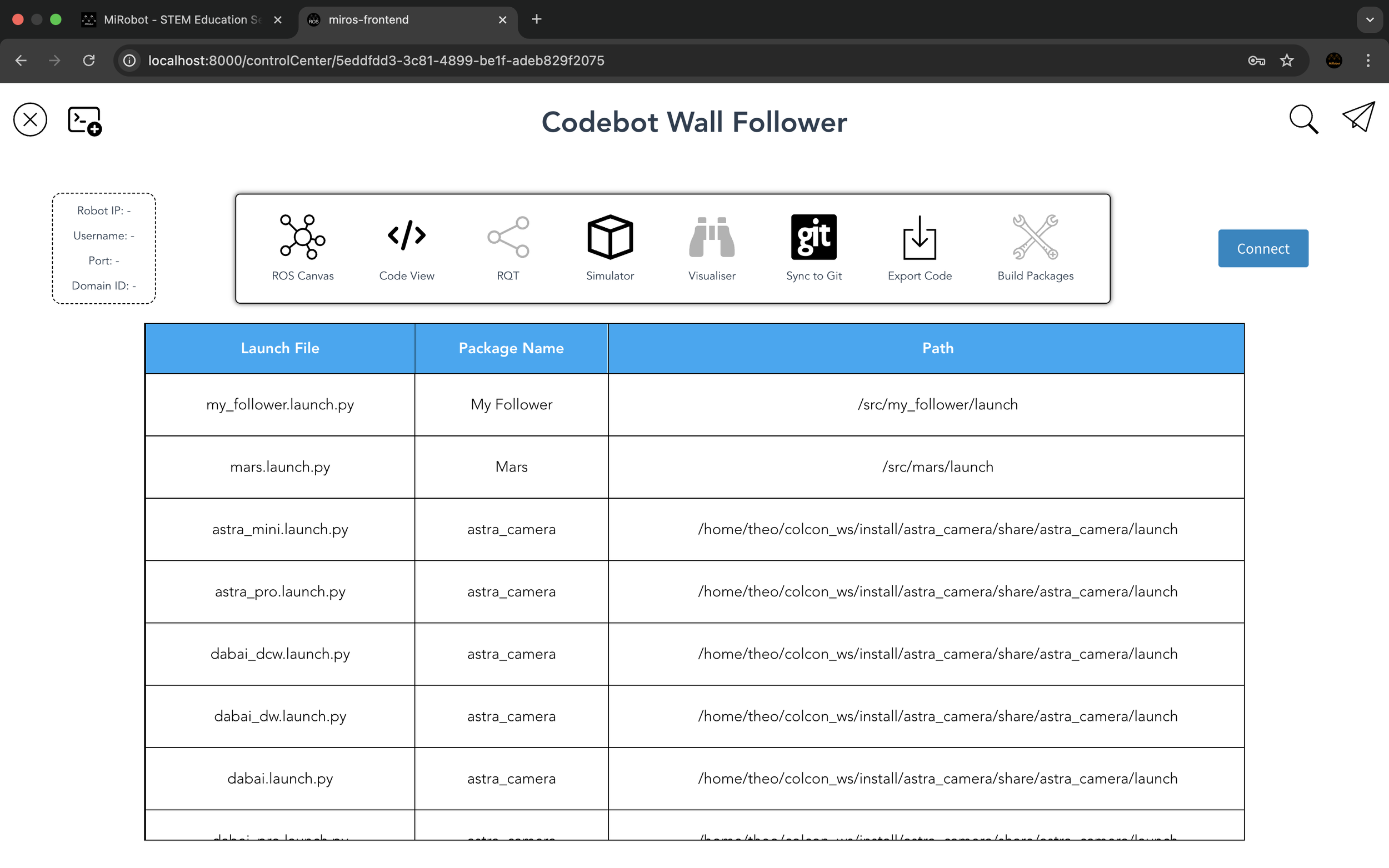 Image 6 of 8
Image 6 of 8
 Image 7 of 8
Image 7 of 8
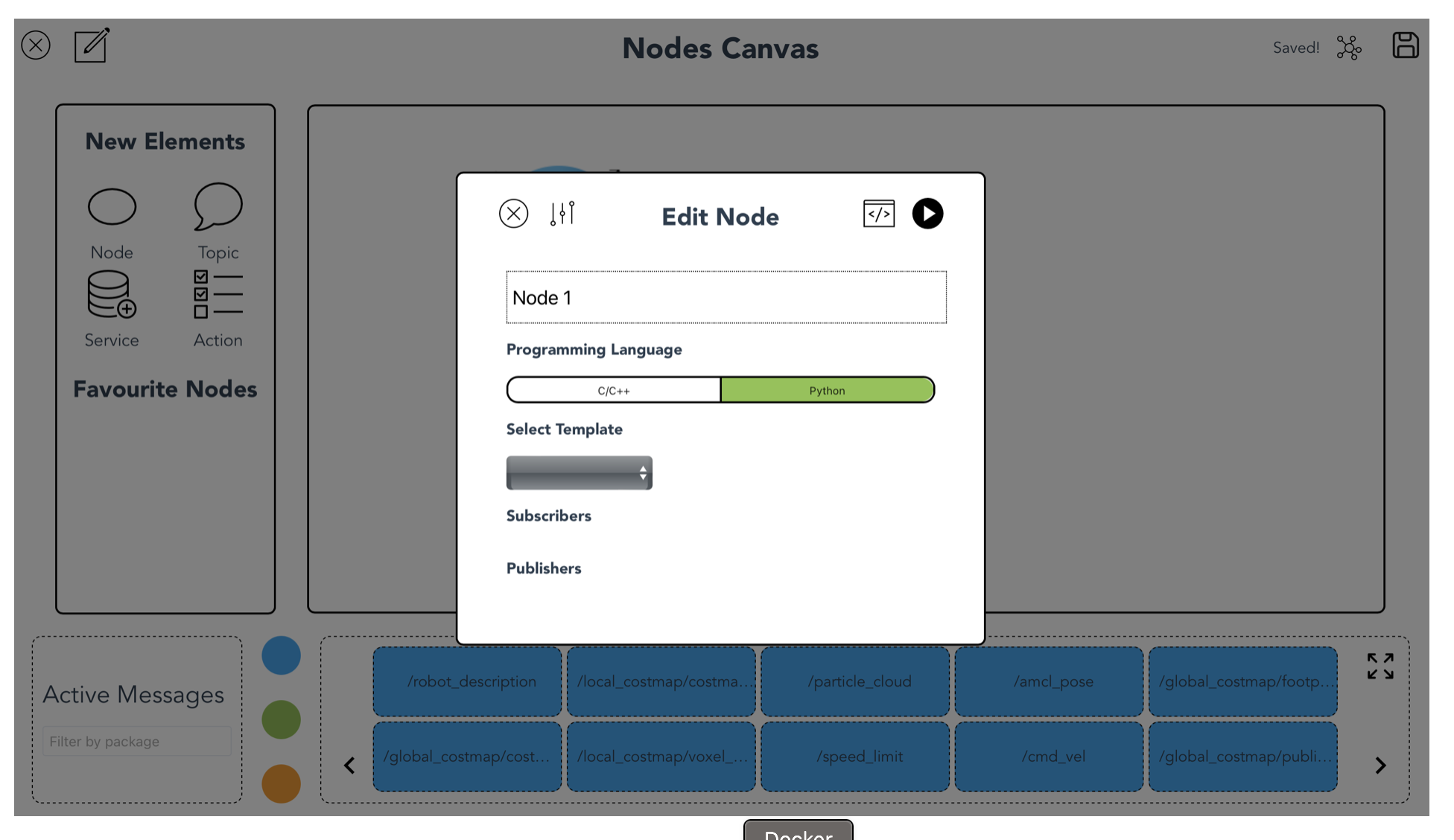 Image 8 of 8
Image 8 of 8
Highlights
Built-in RTK+GNSS Module and GPS Antenna
ROS Computer - Jetson Orin NX 16GB, superior for computer vision
LS 3D C16 LiDAR - sensing range up to 70m
Gemini Pro Depth Camera
Bundled with Autoware software (ROS 2 compatible)
Models
Autobot
Autobot AC - bundled with Auto Charge station
Autobot Plus
Autobot Plus AC - bundled with Auto Charge station
Why ROS?
ROS is the most popular robot operating system in the world. A hardware platform based on ROS will benefit the user gaining extensive practical skills from the world’s most promising robot operating system. Autobot is fully compatible with ROS 2 Humble.
What is MiROS?
MiROS is a cloud-based ROS (Robot Operating System) visual programming tool. ROS is based on Linux and requires programming skills in C/C++ or Python. MiROS enables Mac/Windows users to develop ROS programs by drag-and-drop coding without the need to install a Linux VM (Virtual Machine).
GPS
No need to set up a fixed ground RTK/GNSS base station anymore. Autobot comes with an onboard RTK/GNSS module and a GPS antenna. You can program your Autobot to navigate via GPS anywhere anytime.
Autoware
Autoware is the world's leading open-source software project for autonomous driving. Autoware is built on Robot Operating System (ROS) and enables commercial deployment of autonomous driving in a broad range of vehicles and applications.
Quick Start
ROS 2 and Ubuntu 22.04 images are pre-loaded on Autobot which include all the essential ROS software packages and drivers. Our online tutorial will guide the user how to launch Autobot and its ROS packages within minutes.
Complete Solution
Autobot is a complete package for ROS learning and research projects bundled with all essential hardware components and ROS software for autonomous projects.
Key Functions:
Computer Vision
OpenCV
KCF tracking
R label recognition
RGB visual line tracking
Skeleton tracking
3D object recognition
ORB mapping
SLAM & Navigation
Obstacle avoidance
rtab visual mapping
rtab visual+LiDAR mapping
Gmapping Hector mapping
Karto mapping
Cartographer mapping
Cartographer 3D Reconstruction
RRT path planning
LIO-SAM 3D Reconstruction
LeGO-LOAM 3D Reconstruction
Deep Learning
YOLO object recognition
YOLO gesture recognition
YOLO traffic sign recognition
Deep learning model training
Gesture control
Tensorflow object recognition
Tensorflow target detection
Tensorflow handwritten number recognition
What’s included:
Hardware:
ROS Computer (Jetson Orin NX 16GB)
GPS Antenna
LS 3D C16 LiDAR
Gemini Pro Depth Camera
Battery Capacity:
Autobot and Autobot AC: 6,000 mAh
Autobot Plus and Autobot Plus AC: 20,000 mAh
Battery charger
LCD Touch Screen
Software:
Onboard Ubuntu, ROS and STM32 driver
Software:
MiROS - ROS Visual Programming Web-based Tool
Autoware - open-source autonomous driving software stack
ROS 2 Humble Packages and Source Codes
iOS and Android Remote Control Apps
3D Model Files (STP and URDF)